

PythonRobotics

![]()

![]()
Python codes for robotics algorithm.
Table of Contents
- What is this?
- Requirements
- Documentation
- How to use
- Localization
- Mapping
- SLAM
- Path Planning
- Path Tracking
- Arm Navigation
- Aerial Navigation
- Bipedal
- License
- Use-case
- Contribution
- Citing
- Support
- Authors
What is this?
This is a Python code collection of robotics algorithms, especially for autonomous navigation.
Features:
Easy to read for understanding each algorithm’s basic idea.
Widely used and practical algorithms are selected.
Minimum dependency.
See this paper for more details:
Requirements
Python 3.7.x (2.7 is not supported)
numpy
scipy
matplotlib
pandas
Documentation
This README only shows some examples of this project.
If you are interested in other examples or mathematical backgrounds of each algorithm,
You can check the full documentation online: https://pythonrobotics.readthedocs.io/
All animation gifs are stored here: AtsushiSakai/PythonRoboticsGifs: Animation gifs of PythonRobotics
How to use
- Clone this repo.
git clone https://github.com/AtsushiSakai/PythonRobotics.git
cd PythonRobotics/
- Install the required libraries. You can use environment.yml with conda command.
conda env create -f environment.yml
Execute python script in each directory.
Add star to this repo if you like it :smiley:.
Localization
Extended Kalman Filter localization

Documentation: Notebook
Particle filter localization

This is a sensor fusion localization with Particle Filter(PF).
The blue line is true trajectory, the black line is dead reckoning trajectory,
and the red line is estimated trajectory with PF.
It is assumed that the robot can measure a distance from landmarks (RFID).
This measurements are used for PF localization.
Ref:
Histogram filter localization

This is a 2D localization example with Histogram filter.
The red cross is true position, black points are RFID positions.
The blue grid shows a position probability of histogram filter.
In this simulation, x,y are unknown, yaw is known.
The filter integrates speed input and range observations from RFID for localization.
Initial position is not needed.
Ref:
Mapping
Gaussian grid map
This is a 2D Gaussian grid mapping example.

Ray casting grid map
This is a 2D ray casting grid mapping example.

Lidar to grid map
This example shows how to convert a 2D range measurement to a grid map.

k-means object clustering
This is a 2D object clustering with k-means algorithm.

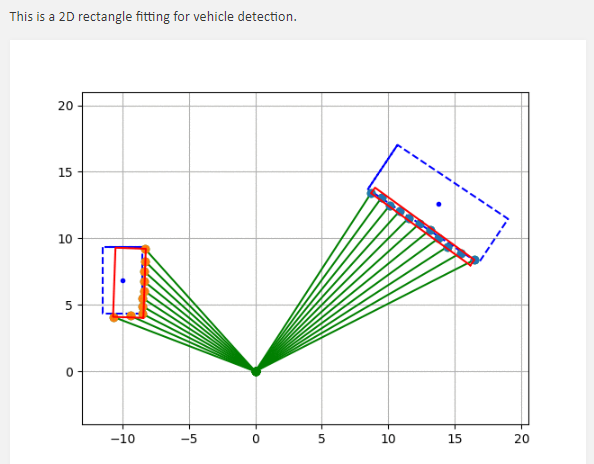
Rectangle fitting
This is a 2D rectangle fitting for vehicle detection.

SLAM
Simultaneous Localization and Mapping(SLAM) examples
Iterative Closest Point (ICP) Matching
This is a 2D ICP matching example with singular value decomposition.
It can calculate a rotation matrix and a translation vector between points to points.

Ref:
FastSLAM 1.0
This is a feature based SLAM example using FastSLAM 1.0.
The blue line is ground truth, the black line is dead reckoning, the red line is the estimated trajectory with FastSLAM.
The red points are particles of FastSLAM.
Black points are landmarks, blue crosses are estimated landmark positions by FastSLAM.

Ref:
Path Planning
Dynamic Window Approach
This is a 2D navigation sample code with Dynamic Window Approach.

Grid based search
Dijkstra algorithm
This is a 2D grid based shortest path planning with Dijkstra’s algorithm.

In the animation, cyan points are searched nodes.
A* algorithm
This is a 2D grid based shortest path planning with A star algorithm.

In the animation, cyan points are searched nodes.
Its heuristic is 2D Euclid distance.
Potential Field algorithm
This is a 2D grid based path planning with Potential Field algorithm.

In the animation, the blue heat map shows potential value on each grid.
Ref:
Grid based coverage path planning
This is a 2D grid based coverage path planning simulation.

State Lattice Planning
This script is a path planning code with state lattice planning.
This code uses the model predictive trajectory generator to solve boundary problem.
Ref:
Biased polar sampling

Lane sampling

Probabilistic Road-Map (PRM) planning

This PRM planner uses Dijkstra method for graph search.
In the animation, blue points are sampled points,
Cyan crosses means searched points with Dijkstra method,
The red line is the final path of PRM.
Ref:
Rapidly-Exploring Random Trees (RRT)
RRT*

This is a path planning code with RRT*
Black circles are obstacles, green line is a searched tree, red crosses are start and goal positions.
Ref:
RRT* with reeds-shepp path
 )
)
Path planning for a car robot with RRT* and reeds shepp path planner.
LQR-RRT*
This is a path planning simulation with LQR-RRT*.
A double integrator motion model is used for LQR local planner.

Ref:
Quintic polynomials planning
Motion planning with quintic polynomials.

It can calculate 2D path, velocity, and acceleration profile based on quintic polynomials.
Ref:
Reeds Shepp planning
A sample code with Reeds Shepp path planning.

Ref:
LQR based path planning
A sample code using LQR based path planning for double integrator model.

Optimal Trajectory in a Frenet Frame

This is optimal trajectory generation in a Frenet Frame.
The cyan line is the target course and black crosses are obstacles.
The red line is predicted path.
Ref:
Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame
Optimal trajectory generation for dynamic street scenarios in a Frenet Frame
Path Tracking
move to a pose control
This is a simulation of moving to a pose control

Ref:
Stanley control
Path tracking simulation with Stanley steering control and PID speed control.

Ref:
Rear wheel feedback control
Path tracking simulation with rear wheel feedback steering control and PID speed control.

Ref:
Linear–quadratic regulator (LQR) speed and steering control
Path tracking simulation with LQR speed and steering control.

Ref:
Model predictive speed and steering control
Path tracking simulation with iterative linear model predictive speed and steering control.

Ref:
Nonlinear Model predictive control with C-GMRES
A motion planning and path tracking simulation with NMPC of C-GMRES

Ref:
Arm Navigation
N joint arm to point control
N joint arm to a point control simulation.
This is a interactive simulation.
You can set the goal position of the end effector with left-click on the ploting area.

In this simulation N = 10, however, you can change it.
Arm navigation with obstacle avoidance
Arm navigation with obstacle avoidance simulation.

Aerial Navigation
drone 3d trajectory following
This is a 3d trajectory following simulation for a quadrotor.

rocket powered landing
This is a 3d trajectory generation simulation for a rocket powered landing.

Ref:
Bipedal
bipedal planner with inverted pendulum
This is a bipedal planner for modifying footsteps with inverted pendulum.
You can set the footsteps and the planner will modify those automatically.

License
MIT
Use-case
If this project helps your robotics project, please let me know with ![]() .
.
Your robot’s video, which is using PythonRobotics, is very welcome!!
This is a list of other user’s comment and references:users_comments
Contribution
A small PR like bug fix is welcome.
If your PR is merged multiple times, I will add your account to the author list.
Citing
If you use this project’s code for your academic work, we encourage you to cite our papers
If you use this project’s code in industry, we’d love to hear from you as well; feel free to reach out to the developers directly.
Support
If you or your company would like to support this project, please consider:
You can add your name or your company logo in README if you are a patron.
E-mail consultant is also available.
Your comment using ![]() is also welcome.
is also welcome.
This is a list: Users comments